General FAQ
1. What does exactly mean “Robot must not be dangerous or excessively annoying”?
A: It means exactly that it must not be dangerous or excessively annoying. That applies to all its living or nonliving environment like the playing field, the bear, other contest participants, referees, public etc. What is and what is not dangerous or excessively annoying is, among others, defined by laws, generally accepted regulations and referee decisions. For example, a robot equipped with a chainsaw would be both dangerous (sharp saw) and annoying (the noise). We also recommend using common sense.
2. May we use lasers?
A: If they are not dangerous, the robot may use any kind of sensors, be it contact (bumpers, switches etc.) or distance (cameras, IR or ultrasonic sensors, lasers etc.). If you are not sure about the safety, contact the organisers well in advance.
3. May the robot touch the walls or bump into them?
A: Yes, just is must not damage or destroy them.
4. May I start the robot using remote control?
A: Except of Bear Rescue Beginner, no. Remote control is external connection which is not allowed during the start.
5. If my robot is smaller than 10x7 cm, the marking would not fit on it. Is it a problem?
A: In such case, we could make an alternative marking.
6. Can you give us exact mm dimensions of the playing field, the walls, the bear etc.? Which exact colours will be used (RAL), which materials?
A: We do not specify such unimportant details. Build your robot so that this does not matter.
7. Will the playing field be smooth? Will it be constructed from one or more pieces?
A: The playing field may be constructed of more than one piece. We will aim for a flat playing field without considerable steps or gaps etc., but you can expect small unevenness at the joints.
8. May we us a combustion motor?
A: Do not use combustion engines, pyrotechnics, caustics etc. As the contest will be held indoors, we would consider it dangerous and annoying.
9. May we use Li-Po accumulators?
A: Yes, if they are handled safe way and according to the manufacturer’s instructions. But that applies to any kind of energy source.
10. May I use a computer for controlling the robot, image processing etc.?
A: It is up to the robot builder’s decision. As for autonomous robots, all systems – including that computer – must be in the robot so if the computer is inside, then yes, you can use a computer. If the control is off the robot and there is some communication between them then it is not an autonomous robot. If you use some kind of wireless connection (e.g. for programming), we strongly recommend to build it so that you can provably show it cannot be used during the play (e.g. physically disconnect the unit or so). The only exception we might think of would be one way transfer of the video to be presented “what the robot sees” to the public.
11. I'd like to know if the 'electronic fight' systems, e.g. electromagnetic noise generators, decoy/distraction IR LED's and/or stealth technologies are allowed.
A: Intentional interference, noise production, sensor jamming etc. is strongly in opposition to the competition spirit. That is a brute force solution, not a clever technique. Moreover, it could harmfully affect not only the opponent but also robots in other contests, measurement instruments, wireless connection of referee computers, camera focusing, security instruments, communication and security devices etc. In such case, you would be disqualified without hesitation, that is clear. So, this is not allowed. The teams should aim for clever construction, algorithms, procedures for their robot defence. Our competitions are primarily for amateur, students, fans; it is more important to learn than to find our which robot is the best one, especially if that should be because its builder can access or can afford buying super-hi-tech technology. So passive defence is allowed if taken on reasonable level and with common sense.
Construction Kits FAQ
1. What does it mean the robot must be constructed from one selected construction kit? What if it does not contain a sensor I need?
A: The robot must be constructed fully from the selected kit, i.e. its structure, control, sensorics and actuation (drive). If the kit does not feature some of the mentioned areas, the participants may use anything else. For example, the control unit is present in Lego but not in Meccano while the propulsion is present in both, therefore a robot built from Lego must have the Lego control unit (RCX, NXT, EV3) as well as Lego motors, while a robot built from Meccano must have Meccano motors but can have any control unit (be it Arduino, Raspberry Pi, your own or any other). You also have to equip your Lego robot with official Lego sensors and cannot use your own.
2. Can I use non-original, but commercial sensors for Lego?
A: No. Lego produces sensors, and the rules say you have to use sensors from that kit of your choice. Therefore you have to use Lego sensors and cannot use other sensors. Parts used for Lego-based robots must be manufactured and distributed by Lego or Lego licensed parts from third party manufacturers.
3. Lego does not produce accellerometers. Can I use my own?
A: No. If there is something the producer makes in a specific category (structure, control, sensorics, actuation), you have to stick to the range the producer offers.
For example:
• If you select Meccano as the construction set, all mechanical structures and motors must be from Meccano as Meccano produces it. However, sensors and control unit can be whatever you like because Meccano does not produce sensors nor control units.
• If you select Lego as the construction set, all mechanical structures, motors, sensor and control units must be from Lego because Lego produces at least one of each. (hypoteticaly: should Lego produce no sensors, you could use whatever you want. But Lego makes some sensors and therefore you have to use those.)
4. You mention "single-purpose specialized robot kits" are excluded. What exactly is that?
A: A "single-purpose specialized robot kit" is something which is not a general construction kit. You build a single robot but you cannot build more than that.
For example:
• Tamyia 75020 Line Tracing Snail Kit is a single-purpose robot kit
• Fischertechnik 524328 ROBOTICS TXT Discovery Set is a general robot construction kit
5. If I use Lego, can I use more control units for one robot?
A: Yes, if all of them are Lego and all are mounted at the robot. If you need, you can even combine them, e.g. use one newest EV3, two older NXT units and four RCX units. The same with the sensors - use as many sensors as you need, provided that all are from Lego.
6. Do I have to mount the emergency switch to my Lego robot for Bear Rescue (Ketchup House)?
A: Yes, of course. Read the rules.
7. Can I use two (or more) packages / construction sets?
A: Yes, if they are of the same brand name (e.g. it does not matter if you use two #1234 boxes or #1234 and #76543 or any other combination).
8. May I use strings, wires, rubber bands, stickers?
A: If they come from your construction set box "as bought" then yes, you may. However, if they were not originally part of the construction kit, then they cannot be used for the construction of your robot. Such additional parts may be used only for decoration and must not be used as support material, to reinforce the chassis etc. So you may equip your robot for example with a flag but that flag must not be used otherwise.
9. I need to have some buttons on my robot, can I add them?
A: Similarly to previous Q/A, you may add buttons as long as they come from the construction kit (they fall in the "sensory" part). There is one exception - the emergency switch may be of any origin.
Of course, if the manufacturer does not provide any sensors, you may use whatever sensor you like, including the buttons.
10. Does the remote control in Bear Rescue Beginner Kit contest need to be made also of the construction kit parts?
A: No,the remote control may be of any kind and does not need to be from the construction set of your choice. That is fully in accordance to the rules as the rules describe the robot itself, not the remote control.
Contest-specific FAQ
Bear Rescue
1. How big may the robot be?
A:It is not defined. Of course, the robot must be able to do the task on the playing field, but there is no limitation for any of its dimensions. Just consider that it has to travel from the starting area to other side of the playing field and back again, and that it must not lean over the walls. So build it so that it can efficiently manoeuvre there.
2. How the robot may catch and hold the bear?
A: Any way, just you must not damage it. It could hold it by a robotic hand, shovel, rake, net – anyhow. It can also push it or pull it on the ground. Of course, it may not throw the bear as that would be dangerous (for the bear).
3. What happens if the robot drops the bear on its way back home?
A: No problem. The principal task is to rescue him and carry home.
4. What happens if the bear fells off the playing field?
A: This should definitely not happen! The playing field may be on a risen base so it would be dangerous for the bear to fall out.
5. How many rescue attempts can we do in one round?
A: The organizers will aim for a fair contest. As long as time and other conditions allow, we will allow repeated tries. We will prioritize robots with fewer attempts; order of the rescue runs will be set by the organizer.
6. May the robot in Beginner category be controlled by more than one operator?
A: Yes.
7. Are there some limitations or requirements for the remote control in Beginner category (e.g. wire length, control panel features etc.)
A: No, only standard safety rules apply. People will not be allowed to step on the playing field so in case of a wired connection, the wire should be long enough to make useful connection between the operator(s) and the robot.
Mini Sumo
1. Is a "Start Module" required or will the start be preformed by activating a switch located on a robot? "Start Module" is a small PCB board which activates robot remotely by IRDA (such boards are used i.e in WIENA, WROCLAW, WARSZAWA).
A: We know such modules. We do not use them primarily but it is possible to use them. We require the robot starts running 5 sec after manual start performed by pressing a button on the robot, which is easier for beginner teams (and cheaper too). So with those 5s the one who starts the robot has time to leave the playfield area and the robots are not confused for example by detecting your hand instead of the opponent. If you already have such module, then you can use it instead of manually starting and do the 5s delay in software exactly as if the button was pressed on the robot.
Robo Carts
1. The rules say: Before the race, participants place their robots one after one into the pits during maximum 30 sec each. Did I understand well that before the start one can tell the robot in which starting box the robot is located?
A: Yes, you can set it so. The robot may know its exact starting position.
2. As seen on the picture, the starting pits partly cover the line. Is it correct?
A: Yes, it is correct. However, after the start, the pits will be removed so the line can be used.
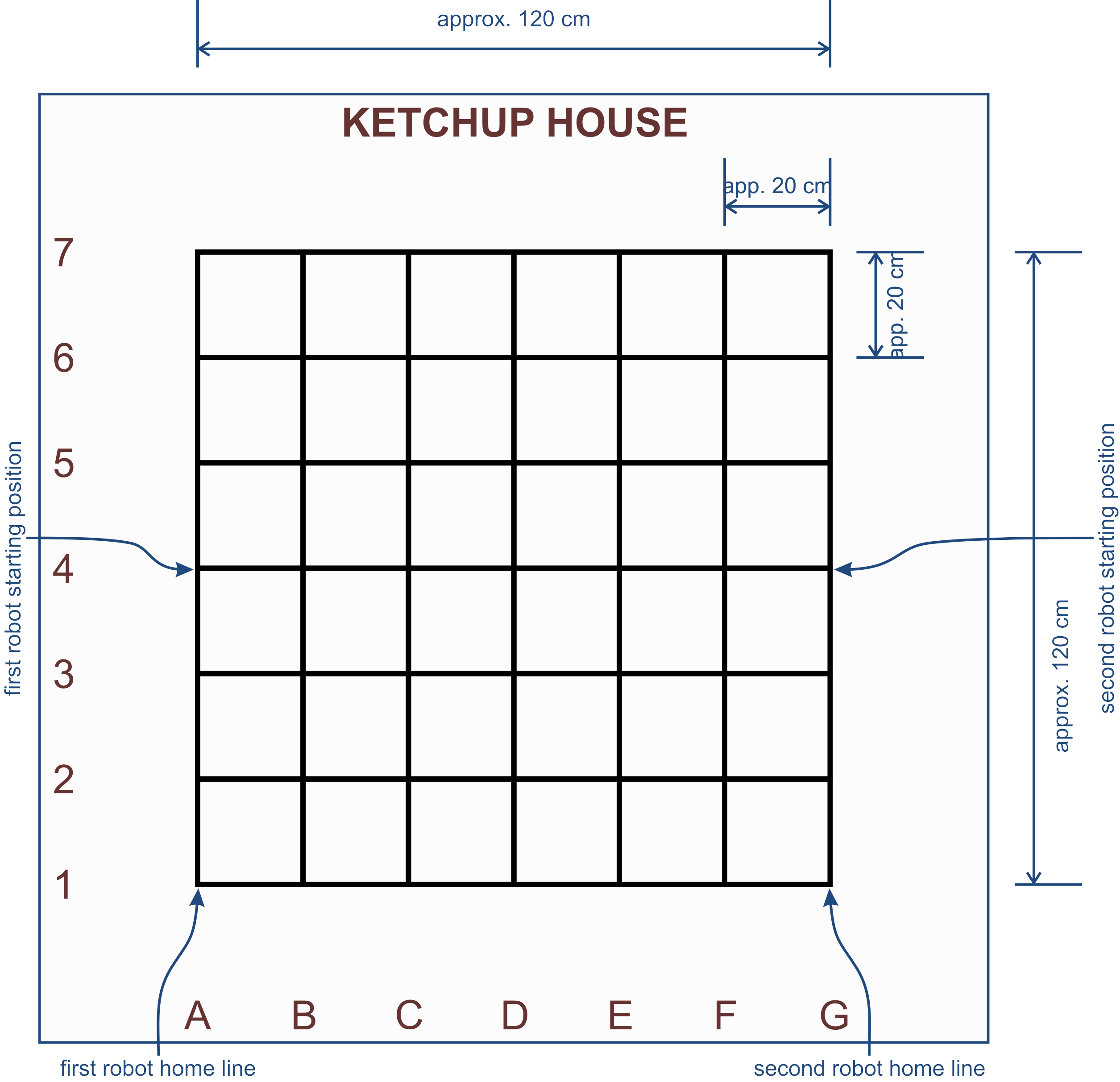
Ketchup House
1. How do you measure that the robots are "at least one square away"?
A: By eye. Both robots must be at least that far, so that they are off the four squares around the can. E.g. if the picked can was at C5, the new one will be replaced only when the area from B4 to D6 (including the lines) is robot-free.
2. If the robot drops the can, will it be replaced to its original position?
A: Definitely no, neither the robot, nor the can. Both will be left wherever they are.
3. After a can is picked up, when will be the new one deployed? Immediatelly or when the robot puts it somewhere?
A: The new one will be deployed as soon as both robots are at least one square away, regardless where the original can is (it must be just somewhere else so that the new one can be placed there).
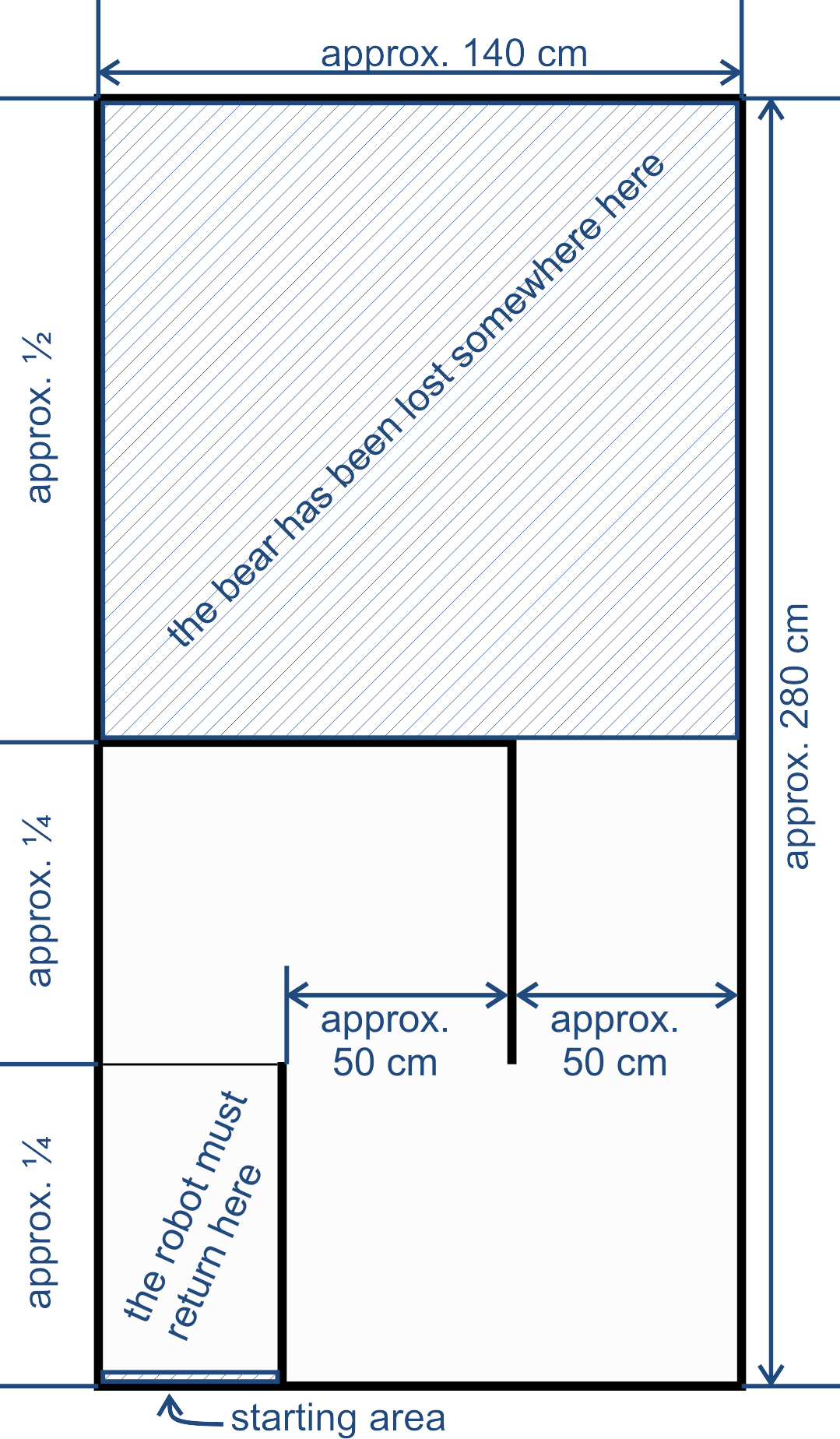
Playing fields
Some schematic drawings of playing fields:| Ketchup House | RoboCarts | Bear Rescue |
| 
| 
|
If you have more questions, simply ask : the forum or email.